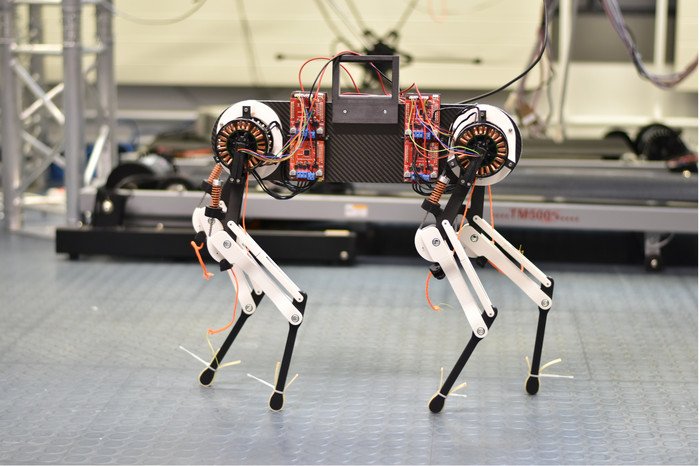
Исследователи из Института интеллектуальных систем Макса Планка в Штутгарте (Германия) построили четвероногого робота размером с собаку, чтобы выяснить, как животные учатся ходить. Роботу было достаточно часа, чтобы научиться ходить не спотыкаясь, сообщает пресс-служба института. Результаты исследования появились в журнале Nature Machine Intelligence.
Когда мы ходим, у нас работают сети нейронов в спинном мозге, которые производят периодические мышечные сокращения без участия головного мозга. Это так называемые центральные генераторы паттернов (CPG), они помогают решать ритмические задачи, такие как ходьба или моргание.
Пока молодое животное ходит по идеально плоской поверхности, CPG может быть достаточно для управления сигналами движения от спинного мозга. Однако небольшая неровность на земле меняет походку. Включаются рефлексы, которые регулируют движения, чтобы животное не упало. Эти мгновенные изменения в сигналах движения обратимы, или «эластичны», и модели движения возвращаются к своей первоначальной конфигурации после нарушения. Но если животное не перестает спотыкаться на многих циклах движения, несмотря на активные рефлексы, то модели движения необходимо переучивать и делать необратимыми. У новорожденного животного CPG изначально еще недостаточно отрегулированы, и животное спотыкается как на ровной, так и на неровной местности. Но животное быстро усваивает, как его CPG и рефлексы контролируют мышцы ног и сухожилия.
То же самое относится и к собаке-роботу «Морти». Только робот оптимизирует свои движения быстрее, чем животное, примерно за час. CPG «Морти» выглядит как модель на небольшом и легком компьютере, которая управляет движением ног робота. Этот виртуальный спинной мозг помещается на спину четвероногого робота, где должна быть голова. В течение часа, данные датчика от ног робота постоянно сравниваются с ожидаемыми результатами, предсказанным CPG робота. Если робот спотыкается, алгоритм обучения меняет движение: как сильно лапы робота двигаются вперед и назад, и как долго лапа находится на земле. Скорректированное движение также влияет на то, насколько хорошо робот может использовать свою податливую механику ног. В процессе обучения CPG посылает адаптированные двигательные сигналы, чтобы робот меньше спотыкался и оптимизировал свою походку.
При этом виртуальный спинной мозг ничего не знает о конструкции ног робота, его двигателях и пружинах. Это позволяет компьютеру «Морти» потреблять всего пять ватт энергии в процессе ходьбы. Промышленные четвероногие роботы известных производителей, которые научились работать с помощью сложных контроллеров, требуют гораздо больше энергии – от нескольких десятков до нескольких сотен ватт. Оба типа роботов действуют динамично и эффективно, но потребление вычислительной энергии в модели Штутгарта намного ниже. Также эта модель дает важные сведения об анатомии животных.
Источник: Научная Россия












Президент Международного Института Развития Научного Сотрудничества
Российский политолог, историк, публицист.
Доктор политических наук, профессор МГИМО

Генеральный директор Международного Института Развития Научного Сотрудничества

Научный руководитель Международного Института Развития Научного Сотрудничества
Доктор исторических наук.
Профессор

Председатель Попечительского совета Международного Института Развития Научного Сотрудничества
Доктор исторических наук, профессор, член-корреспондент РАН. Директор Института востоковедения РАН. Член научного совета Российского совета по международным делам.

Заместитель Председателя Попечительского совета Международного Института Развития Научного Сотрудничества
Доктор исторических наук.
Профессор кафедры стран постсоветского зарубежья РГГУ, профессор факультета глобальных процессов МГУ им. М.В. Ломоносова.











.jpg
)